笛卡尔坐标系
- 在這篇文章內,向量與标量分別用粗體與斜體顯示。例如,位置向量通常用 r{displaystyle mathbf {r} ,!}
表示;而其大小則用 r{displaystyle r,!}
來表示。
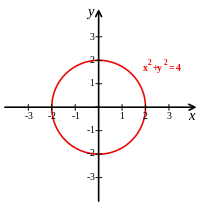
圖1 - 紅色的圓圈,半徑是2,圓心位於直角座標系的原點。此圓的方程為x2+y2=4{displaystyle x^{2}+y^{2}=4}
 。
。在數學裏,笛卡兒坐標系(英语:Cartesian coordinate system),也稱直角坐標系,是一種正交坐標系。參閱圖1,二維的直角坐標系是由兩條相互垂直、相交於原點的數線構成的。在平面內,任何一點的坐標是根據數軸上對應的點的座標設定的。在平面內,任何一點與坐標的對應關係,類似於數軸上點與坐標的對應關係。
採用直角坐標,幾何形狀可以用代數公式明確的表達出來。幾何形狀的每一個點的直角坐標必須遵守這代數公式。例如:直線可以標準式ax+by+c=0{displaystyle ax+by+c=0}


目录
1 歷史
2 二維坐標系統
3 三維坐標系統
4 取向
4.1 二維空間
4.2 三維空間
5 向量
6 參閱
7 參考文獻
8 參考目錄
9 外部連結
歷史
笛卡尔坐標系是由法國數學家勒內·笛卡尔創建的。1637年,笛卡尔發表了巨作《方法論》。這本專門研究與討論西方治學方法的書,提供了許多正確的見解與良好的建議,對於後來的西方學術發展,有很大的貢獻。為了顯示新方法的優點與果效,以及對他個人在科學研究方面的幫助,在《方法論》的附錄中,他增添了另外一本書《幾何》。有關笛卡兒坐標系的研究,就是出現於《幾何》這本書內。笛卡兒在坐標系這方面的研究結合了代數與歐幾里得幾何,對於後來解析幾何、微積分、與地圖學的建樹,具有關鍵的開導力。
二維坐標系統
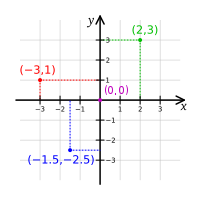
圖2 - 直角坐標系。圖中四點的坐標分別為,綠點:(2, 3){displaystyle (2, 3)}
 ,紅點:(−3, 1){displaystyle (-3, 1)}
,紅點:(−3, 1){displaystyle (-3, 1)} ,藍點:(−1.5, −2.5){displaystyle (-1.5, -2.5)}
,藍點:(−1.5, −2.5){displaystyle (-1.5, -2.5)} ,紫點:(0, 0){displaystyle (0, 0)}
,紫點:(0, 0){displaystyle (0, 0)} 。
。
圖3 - 直角坐標系的四個象限,按照逆時針方向,從象限I{displaystyle I}
 到象限IV{displaystyle IV}
到象限IV{displaystyle IV} 。坐標軸的頭部象徵著,往所指的方向,無限的延伸。
。坐標軸的頭部象徵著,往所指的方向,無限的延伸。參閱圖2,二維的直角坐標系通常由兩個互相垂直的坐標軸設定,通常分別稱為x-軸和 y-軸;兩個坐標軸的相交點,稱為原點,通常標記為O,既有「零」的意思,又是英語「Origin」的首字母。每一個軸都指向一個特定的方向。這兩個不同線的坐標軸,決定了一個平面,稱為xy-平面,又稱為笛卡兒平面。通常兩個坐標軸只要互相垂直,其指向何方對於分析問題是没有影響的,但習慣性地(見右圖),x-軸被水平擺放,稱為橫軸,通常指向右方;y-軸被豎直擺放而稱為縱軸,通常指向上方。兩個坐標軸這樣的位置關係,稱為二維的右手坐標系,或右手系。如果把這個右手系畫在一張透明紙片上,則在平面內無論怎樣旋轉它,所得到的都叫做右手系;但如果把紙片翻轉,其背面看到的坐標系則稱為「左手系」。這和照鏡子時左右對調的性質有關。
為了要知道坐標軸的任何一點,離原點的距離。假設,我們可以刻畫數值於坐標軸。那麼,從原點開始,往坐標軸所指的方向,每隔一個單位長度,就刻畫數值於坐標軸。這數值是刻畫的次數,也是離原點的正值整數距離;同樣地,背著坐標軸所指的方向,我們也可以刻畫出離原點的負值整數距離。稱x-軸刻畫的數值為x-坐標,又稱横坐標,稱y-軸刻畫的數值為y-坐標,又稱縱坐標。雖然,在這裏,這兩個坐標都是整數,對應於坐標軸特定的點。按照比例,我們可以推廣至實數坐標和其所對應的坐標軸的每一個點。這兩個坐標就是直角坐標系的直角坐標,標記為(x, y){displaystyle (x, y)}
任何一個點P在平面的位置,可以用直角坐標來獨特表達。只要從點P畫一條垂直於x-軸的直線。從這條直線與x-軸的相交點,可以找到點P的x-坐標。同樣地,可以找到點P的y-坐標。這樣,我們可以得到點P的直角坐標。例如,參閱圖3,點P的直角坐標是(3, 5){displaystyle (3, 5)}
直角坐標系也可以推廣至三維空間與高維空間 (higher dimension)。
參閱圖3,直角坐標系的兩個坐標軸將平面分成了四個部分,稱為象限,分別用羅馬數字編號為I (+, +){displaystyle I (+, +)}





三維坐標系統

圖4 - 直角坐標系的幾個坐標曲面。紅色平面的x=1{displaystyle x=1}
 。黃色平面的y=−1{displaystyle y=-1}
。黃色平面的y=−1{displaystyle y=-1} 。藍色平面的z=1{displaystyle z=1}
。藍色平面的z=1{displaystyle z=1} 。z-軸是竖直的,以白色表示。x-軸以綠色表示。三個坐標曲面相交於點P(以黑色的圓球表示),直角坐標大約為(1, −1, 1){displaystyle (1, -1, 1)}
。z-軸是竖直的,以白色表示。x-軸以綠色表示。三個坐標曲面相交於點P(以黑色的圓球表示),直角坐標大約為(1, −1, 1){displaystyle (1, -1, 1)} 。
。
圖5 - 三維直角坐標系。y-軸的方向是遠離讀者。
在原本的二維直角坐標系,再添加一個垂直於x-軸,y-軸的坐標軸,稱為z-軸。假若,這三個坐標軸滿足右手定則,則可得到三維的直角坐標系。這z-軸與x-軸,y-軸相互正交於原點。在三維空間的任何一點P,可以用直角坐標(x, y, z){displaystyle (x, y, z)}


三個平面,xy-平面,yz-平面,xz-平面,將三維空間分成了八個部分,稱為卦限 (octant)。與二維空間的四個象限不同,只有一個卦限有編號。第一號卦限的每一個點的三個坐標都是正值的。
取向
二維空間
直角坐標系的x-軸與y-軸必須相互垂直。稱包含y-軸的直線為y-線。在二維空間裏,當我們設定了x-軸的位置與方向的同時,我們也設定了y-線的方向。可是,我們仍舊必須選擇,在y-線的以原點為共同點的兩條半線中,那一條半線的點的坐標是正值的,那一條是負值的?任何一種選擇決定了xy-平面的取向。
參閱圖1。通常,我們選擇的取向是,正值的x-軸横地指向右方,正值的y-軸縱地指向上方。這種取向稱為正值取向,標準取向,或右手取向。
右手定則是一種常用的記憶方法,專門用來辨認正值取向:將一隻半握拳的右手放在平面上,大拇指往上指,那麼,其它的手指都從x-軸指向y-軸。
另外一種取向,採用左手定則,專門用來辨認負值取向,或左手取向:將一隻半握拳的左手放在xy-平面上,大拇指往上指,那麼,其它的手指都從y-軸指向x-軸。
不論坐標軸是何種取向,將坐標系統做任何角度的旋轉,取向仍舊會保持不變。
三維空間

圖8 –左邊是左手取向,右邊是右手取向。
直角坐標系的x-軸,y-軸,與z-軸必須相互垂直。稱包含z-軸的直線為z-線。在三維空間裏,當我們設定了x-軸,y-軸的位置與方向的同時,我們也設定了z-線的方向。可是,我們仍舊必須選擇,在z-線以原點為共同點的兩條半線中,哪一條半線的點的坐標是正值的,哪一條是負值的?這兩種不同的坐標系統,稱為右手坐標系與左手坐標系。右手坐標系又稱為標準坐標系,或正值坐標系。
右手坐標系這名詞是由右手定則而來的。先將右手的手掌與手指伸直。然後,將中指指向往手掌的掌面半空間,與食指呈直角關係。再將大拇指往上指去,與中指,食指都呈直角關係。則大拇指,食指,與中指分別表示了右手坐標系的x-軸,y-軸,與z-軸。同樣地,用左手也可以表示出左手坐標系。
圖8試著展示出一個左手坐標系與一個右手坐標系。因為我們用二維畫面來展示三維物體,會造成扭曲或模稜兩可的圖形。指向下方與右方的軸,也有指向讀者的意思;而位置居於中間的軸,也有指向讀者正在看的方向的意思。平行於xy-平面的紅色圓形曲箭,其紅色箭頭從z-軸前面經過,表示從x-軸往y-軸的旋轉方向。
向量
採用直角坐標系,在三維空間裏,任何一點P都可以用向量來表示。我們可以想像向量為一支羽箭,其箭尾在原點,箭鋒在點P。假若點P的向量是r{displaystyle mathbf {r} }

r=xi^+yj^+zk^{displaystyle mathbf {r} =x{hat {mathbf {i} }}+y{hat {mathbf {j} }}+z{hat {mathbf {k} }}};
其中,單位向量i^{displaystyle {hat {mathbf {i} }}}


參閱
- 廣義坐標
- 正則坐標
- 平行座標
- 象限角
- 卦限
- 正交坐標系
參考文獻
Descartes, René. Oscamp, Paul J. (trans). Discourse on Method, Optics, Geometry, and Meteorology. 2001.
參考目錄
Morse PM, Feshbach H. Methods of Theoretical Physics, Part I. New York: McGraw-Hill. 1953: p. 656. ISBN 978-0-07-043316-8. 引文格式1维护:冗余文本 (link)
Margenau H, Murphy GM. The Mathematics of Physics and Chemistry. New York: D. van Nostrand. 1956: p. 177. 引文格式1维护:冗余文本 (link)
Korn GA, Korn TM. Mathematical Handbook for Scientists and Engineers. New York: McGraw-Hill. 1961: pp. 55–79. ASIN B0000CKZX7. 引文格式1维护:冗余文本 (link)
Sauer R, Szabó I. Mathematische Hilfsmittel des Ingenieurs. New York: Springer Verlag. 1967: p. 94. 引文格式1维护:冗余文本 (link)
Moon P, Spencer DE. Rectangular Coordinates (x, y, z). Field Theory Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions corrected 2nd ed., 3rd print ed. New York: Springer-Verlag. 1988: pp. 9–11 (Table 1.01). ISBN 978-0387184302. 引文格式1维护:冗余文本 (link)
外部連結
- 直角坐標系
- 直角坐標圖的印表
PlanetMath上直角坐標系的資料。- MathWorld的直角坐標系
| ||||||||||


