Finite-state machine


A finite-state machine (FSM) or finite-state automaton (FSA, plural: automata), finite automaton, or simply a state machine, is a mathematical model of computation. It is an abstract machine that can be in exactly one of a finite number of states at any given time. The FSM can change from one state to another in response to some external inputs; the change from one state to another is called a transition. An FSM is defined by a list of its states, its initial state, and the conditions for each transition. Finite state machines are of two types – deterministic finite state machines and non-deterministic finite state machines.[1] A deterministic finite-state machine can be constructed equivalent to any non-deterministic one.
The behavior of state machines can be observed in many devices in modern society that perform a predetermined sequence of actions depending on a sequence of events with which they are presented. Simple examples are vending machines, which dispense products when the proper combination of coins is deposited, elevators, whose sequence of stops is determined by the floors requested by riders, traffic lights, which change sequence when cars are waiting, and combination locks, which require the input of combination numbers in the proper order.
The finite state machine has less computational power than some other models of computation such as the Turing machine.[2] The computational power distinction means there are computational tasks that a Turing machine can do but a FSM cannot. This is because a FSM's memory is limited by the number of states it has. FSMs are studied in the more general field of automata theory.
Contents
1 Example: coin-operated turnstile
2 Concepts and terminology
3 Representations
3.1 State/Event table
3.2 UML state machines
3.3 SDL state machines
3.4 Other state diagrams
4 Usage
5 Classification
5.1 Acceptors (recognizers)
5.2 Classifiers
5.3 Transducers
5.4 Generators
5.5 Determinism
6 Alternative semantics
7 Mathematical model
8 Optimization
9 Implementation
9.1 Hardware applications
9.2 Software applications
9.3 Finite state machines and compilers
10 See also
11 References
12 Further reading
12.1 General
12.2 Finite state machines (automata theory) in theoretical computer science
12.3 Abstract state machines in theoretical computer science
12.4 Machine learning using finite-state algorithms
12.5 Hardware engineering: state minimization and synthesis of sequential circuits
12.6 Finite Markov chain processes
13 External links
Example: coin-operated turnstile

State diagram for a turnstile

A turnstile
An example of a simple mechanism that can be modeled by a state machine is a turnstile.[3][4] A turnstile, used to control access to subways and amusement park rides, is a gate with three rotating arms at waist height, one across the entryway. Initially the arms are locked, blocking the entry, preventing patrons from passing through. Depositing a coin or token in a slot on the turnstile unlocks the arms, allowing a single customer to push through. After the customer passes through, the arms are locked again until another coin is inserted.
Considered as a state machine, the turnstile has two possible states: Locked and Unlocked.[3] There are two possible inputs that affect its state: putting a coin in the slot (coin) and pushing the arm (push). In the locked state, pushing on the arm has no effect; no matter how many times the input push is given, it stays in the locked state. Putting a coin in – that is, giving the machine a coin input – shifts the state from Locked to Unlocked. In the unlocked state, putting additional coins in has no effect; that is, giving additional coin inputs does not change the state. However, a customer pushing through the arms, giving a push input, shifts the state back to Locked.
The turnstile state machine can be represented by a state transition table, showing for each possible state, the transitions between them (based upon the inputs given to the machine) and the outputs resulting from each input:
Current State
Input
Next State
Output
Locked
coin
Unlocked
Unlocks the turnstile so that the customer can push through.
push
Locked
None
Unlocked
coin
Unlocked
None
push
Locked
When the customer has pushed through, locks the turnstile.
The turnstile state machine can also be represented by a directed graph called a state diagram (above). Each state is represented by a node (circle). Edges (arrows) show the transitions from one state to another. Each arrow is labeled with the input that triggers that transition. An input that doesn't cause a change of state (such as a coin input in the Unlocked state) is represented by a circular arrow returning to the original state. The arrow into the Locked node from the black dot indicates it is the initial state.
Concepts and terminology
A state is a description of the status of a system that is waiting to execute a transition. A transition is a set of actions to be executed when a condition is fulfilled or when an event is received.
For example, when using an audio system to listen to the radio (the system is in the "radio" state), receiving a "next" stimulus results in moving to the next station. When the system is in the "CD" state, the "next" stimulus results in moving to the next track. Identical stimuli trigger different actions depending on the current state.
In some finite-state machine representations, it is also possible to associate actions with a state:
- an entry action: performed when entering the state, and
- an exit action: performed when exiting the state.
Representations

Fig. 1 UML state chart example (a toaster oven)
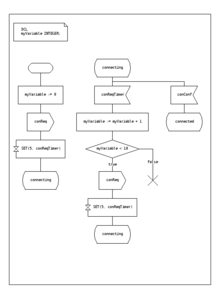
Fig. 2 SDL state machine example
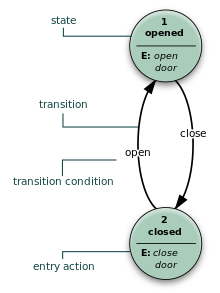
Fig. 3 Example of a simple finite state machine
State/Event table
Several state transition table types are used. The most common representation is shown below: the combination of current state (e.g. B) and input (e.g. Y) shows the next state (e.g. C). The complete action's information is not directly described in the table and can only be added using footnotes. A FSM definition including the full actions information is possible using state tables (see also virtual finite-state machine).
Current state Input | State A | State B | State C |
|---|---|---|---|
| Input X | … | … | … |
| Input Y | … | State C | … |
| Input Z | … | … | … |
UML state machines
The Unified Modeling Language has a notation for describing state machines. UML state machines overcome the limitations of traditional finite state machines while retaining their main benefits. UML state machines introduce the new concepts of hierarchically nested states and orthogonal regions, while extending the notion of actions. UML state machines have the characteristics of both Mealy machines and Moore machines. They support actions that depend on both the state of the system and the triggering event, as in Mealy machines, as well as entry and exit actions, which are associated with states rather than transitions, as in Moore machines.[citation needed]
SDL state machines
The Specification and Description Language is a standard from ITU that includes graphical symbols to describe actions in the transition:
- send an event
- receive an event
- start a timer
- cancel a timer
- start another concurrent state machine
- decision
SDL embeds basic data types called "Abstract Data Types", an action language, and an execution semantic in order to make the finite state machine executable.[citation needed]
Other state diagrams
There are a large number of variants to represent an FSM such as the one in figure 3.
Usage
In addition to their use in modeling reactive systems presented here, finite state machines are significant in many different areas, including electrical engineering, linguistics, computer science, philosophy, biology, mathematics, and logic. Finite state machines are a class of automata studied in automata theory and the theory of computation.
In computer science, finite state machines are widely used in modeling of application behavior, design of hardware digital systems, software engineering, compilers, network protocols, and the study of computation and languages.
Classification
Finite state machines can be subdivided into transducers, acceptors, classifiers and sequencers.[5]
Acceptors (recognizers)

Fig. 4 Acceptor FSM: parsing the string "nice"
Acceptors (also called recognizers and sequence detectors), produce binary output, indicating whether or not the received input is accepted. Each state of an FSM is either "accepting" or "not accepting". Once all input has been received, if the current state is an accepting state, the input is accepted; otherwise it is rejected. As a rule, input is a sequence of symbols (characters); actions are not used. The example in figure 4 shows a finite state machine that accepts the string "nice". In this FSM, the only accepting state is state 7.
A (possibly infinite) set of symbol sequences, aka. formal language, is called a regular language if there is some Finite State Machine that accepts exactly that set. For example, the set of binary strings with an even number of zeroes is a regular language (cf. Fig. 5), while the set of all strings whose length is a prime number is not.[6]:18,71
A machine could also be described as defining a language, that would contain every string accepted by the machine but none of the rejected ones; that language is "accepted" by the machine. By definition, the languages accepted by FSMs are the regular languages—; a language is regular if there is some FSM that accepts it.
The problem of determining the language accepted by a given finite state acceptor is an instance of the algebraic path problem—itself a generalization of the shortest path problem to graphs with edges weighted by the elements of an (arbitrary) semiring.[7][8][jargon]

Fig. 5: Representation of a finite-state machine; this example shows one that determines whether a binary number has an even number of 0s, where S1{displaystyle S_{1}}
 is an accepting state.
is an accepting state.The start state can also be an accepting state, in which case the automaton accepts the empty string.
An example of an accepting state appears in Fig.5: a deterministic finite automaton (DFA) that detects whether the binary input string contains an even number of 0s.
S1 (which is also the start state) indicates the state at which an even number of 0s has been input. S1 is therefore an accepting state. This machine will finish in an accept state, if the binary string contains an even number of 0s (including any binary string containing no 0s). Examples of strings accepted by this DFA are ε (the empty string), 1, 11, 11…, 00, 010, 1010, 10110, etc.
Classifiers
A classifier is a generalization of a finite state machine that, similar to an acceptor, produces a single output on termination but has more than two terminal states.[citation needed]
Transducers
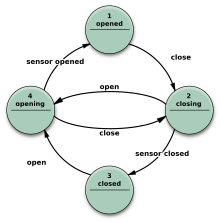
Fig. 6 Transducer FSM: Moore model example
Transducers generate output based on a given input and/or a state using actions. They are used for control applications and in the field of computational linguistics.
In control applications, two types are distinguished:
- Moore machine
- The FSM uses only entry actions, i.e., output depends only on the state. The advantage of the Moore model is a simplification of the behaviour. Consider an elevator door. The state machine recognizes two commands: "command_open" and "command_close", which trigger state changes. The entry action (E:) in state "Opening" starts a motor opening the door, the entry action in state "Closing" starts a motor in the other direction closing the door. States "Opened" and "Closed" stop the motor when fully opened or closed. They signal to the outside world (e.g., to other state machines) the situation: "door is open" or "door is closed".

Fig. 7 Transducer FSM: Mealy model example
- Mealy machine
- The FSM also uses input actions, i.e., output depends on input and state. The use of a Mealy FSM leads often to a reduction of the number of states. The example in figure 7 shows a Mealy FSM implementing the same behaviour as in the Moore example (the behaviour depends on the implemented FSM execution model and will work, e.g., for virtual FSM but not for event-driven FSM). There are two input actions (I:): "start motor to close the door if command_close arrives" and "start motor in the other direction to open the door if command_open arrives". The "opening" and "closing" intermediate states are not shown.
Generators
Sequencers, or generators, are a subclass of the acceptor and transducer types that have a single-letter input alphabet. They produce only one sequence which can be seen as an output sequence of acceptor or transducer outputs.[citation needed]
Determinism
A further distinction is between deterministic (DFA) and non-deterministic (NFA, GNFA) automata. In a deterministic automaton, every state has exactly one transition for each possible input. In a non-deterministic automaton, an input can lead to one, more than one, or no transition for a given state. The powerset construction algorithm can transform any nondeterministic automaton into a (usually more complex) deterministic automaton with identical functionality.
A finite state machine with only one state is called a "combinatorial FSM". It only allows actions upon transition into a state. This concept is useful in cases where a number of finite state machines are required to work together, and when it is convenient to consider a purely combinatorial part as a form of FSM to suit the design tools.[9]
Alternative semantics
There are other sets of semantics available to represent state machines. For example, there are tools for modeling and designing logic for embedded controllers.[10] They combine hierarchical state machines (which usually have more than one current state), flow graphs, and truth tables into one language, resulting in a different formalism and set of semantics.[11] These charts, like Harel's original state machines,[12] support hierarchically nested states, orthogonal regions, state actions, and transition actions.[13]
Mathematical model
In accordance with the general classification, the following formal definitions are found:
- A deterministic finite state machine or acceptor deterministic finite state machine is a quintuple (Σ,S,s0,δ,F){displaystyle (Sigma ,S,s_{0},delta ,F)}
, where:
Σ{displaystyle Sigma }is the input alphabet (a finite, non-empty set of symbols).
S{displaystyle S}is a finite, non-empty set of states.
s0{displaystyle s_{0}}is an initial state, an element of S{displaystyle S}
δ{displaystyle delta }is the state-transition function: δ:S×Σ→S{displaystyle delta :Stimes Sigma rightarrow S}
(in a nondeterministic finite automaton it would be δ:S×Σ→P(S){displaystyle delta :Stimes Sigma rightarrow {mathcal {P}}(S)}
, i.e., δ{displaystyle delta }
F{displaystyle F}is the set of final states, a (possibly empty) subset of S{displaystyle S}
For both deterministic and non-deterministic FSMs, it is conventional to allow δ{displaystyle delta }





A finite state machine has the same computational power as a Turing machine that is restricted such that its head may only perform "read" operations, and always has to move from left to right. That is, each formal language accepted by a finite state machine is accepted by such a kind of restricted Turing machine, and vice versa.[14]
- A finite-state transducer is a sextuple (Σ,Γ,S,s0,δ,ω){displaystyle (Sigma ,Gamma ,S,s_{0},delta ,omega )}
, where:
Σ{displaystyle Sigma }
Γ{displaystyle Gamma }is the output alphabet (a finite, non-empty set of symbols).
S{displaystyle S}
s0{displaystyle s_{0}}
δ{displaystyle delta }
ω{displaystyle omega }is the output function.
If the output function is a function of a state and input alphabet (ω:S×Σ→Γ{displaystyle omega :Stimes Sigma rightarrow Gamma }

If we disregard the first output symbol of a Moore machine, ω(s0){displaystyle omega (s_{0})}
Optimization
Optimizing an FSM means finding a machine with the minimum number of states that performs the same function. The fastest known algorithm doing this is the Hopcroft minimization algorithm.[16][17] Other techniques include using an implication table, or the Moore reduction procedure. Additionally, acyclic FSAs can be minimized in linear time.[18]
Implementation
Hardware applications
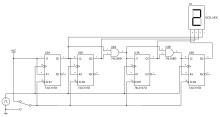
Fig. 9 The circuit diagram for a 4-bit TTL counter, a type of state machine
In a digital circuit, an FSM may be built using a programmable logic device, a programmable logic controller, logic gates and flip flops or relays. More specifically, a hardware implementation requires a register to store state variables, a block of combinational logic that determines the state transition, and a second block of combinational logic that determines the output of an FSM. One of the classic hardware implementations is the Richards controller.
In a Medvedev machine, the output is directly connected to the state flip-flops minimizing the time delay between flip-flops and output.[19][20]
Through state encoding for low power state machines may be optimized to minimize power consumption.
Software applications
The following concepts are commonly used to build software applications with finite state machines:
- Automata-based programming
- Event-driven finite-state machine
- Virtual finite-state machine
- State design pattern
Finite state machines and compilers
Finite automata are often used in the frontend of programming language compilers. Such a frontend may comprise several finite state machines that implement a lexical analyzer and a parser.
Starting from a sequence of characters, the lexical analyzer builds a sequence of language tokens (such as reserved words, literals, and identifiers) from which the parser builds a syntax tree. The lexical analyzer and the parser handle the regular and context-free parts of the programming language's grammar.[21]
See also
Abstract state machines (ASM)
Artificial intelligence (AI)
Abstract State Machine Language (AsmL)- Behavior model
- Communicating finite-state machine
- Control system
- Control table
- Decision tables
DEVS: Discrete Event System Specification
Extended finite-state machine (EFSM)- Finite state machine with datapath
- Hidden Markov model
- Petri net
- Pushdown automaton
Quantum finite automata (QFA)- Recognizable language
- Sequential logic
- Specification and Description Language
- State diagram
- State pattern
- SCXML
- Transition system
- Tree automaton
- Turing machine
- UML state machine
- YAKINDU Statechart Tools
References
^ "Finite State Machines - Brilliant Math & Science Wiki". brilliant.org. Retrieved 14 April 2018..mw-parser-output cite.citation{font-style:inherit}.mw-parser-output q{quotes:"""""""'""'"}.mw-parser-output code.cs1-code{color:inherit;background:inherit;border:inherit;padding:inherit}.mw-parser-output .cs1-lock-free a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/6/65/Lock-green.svg/9px-Lock-green.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-lock-limited a,.mw-parser-output .cs1-lock-registration a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/d/d6/Lock-gray-alt-2.svg/9px-Lock-gray-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-lock-subscription a{background:url("//upload.wikimedia.org/wikipedia/commons/thumb/a/aa/Lock-red-alt-2.svg/9px-Lock-red-alt-2.svg.png")no-repeat;background-position:right .1em center}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration{color:#555}.mw-parser-output .cs1-subscription span,.mw-parser-output .cs1-registration span{border-bottom:1px dotted;cursor:help}.mw-parser-output .cs1-hidden-error{display:none;font-size:100%}.mw-parser-output .cs1-visible-error{font-size:100%}.mw-parser-output .cs1-subscription,.mw-parser-output .cs1-registration,.mw-parser-output .cs1-format{font-size:95%}.mw-parser-output .cs1-kern-left,.mw-parser-output .cs1-kern-wl-left{padding-left:0.2em}.mw-parser-output .cs1-kern-right,.mw-parser-output .cs1-kern-wl-right{padding-right:0.2em}
^ Belzer, Jack; Holzman, Albert George; Kent, Allen (1975). Encyclopedia of Computer Science and Technology. 25. USA: CRC Press. p. 73. ISBN 0-8247-2275-2.
^ ab Koshy, Thomas (2004). Discrete Mathematics With Applications. Academic Press. p. 762. ISBN 0-12-421180-1.
^ Wright, David R. (2005). "Finite State Machines" (PDF). CSC215 Class Notes. David R. Wright website, N. Carolina State Univ. Archived from the original (PDF) on March 27, 2014. Retrieved July 14, 2012.
^ Keller, Robert M. (2001). "Classifiers, Acceptors, Transducers, and Sequencers" (PDF). Computer Science: Abstraction to Implementation (PDF). Harvey Mudd College. p. 480.
^ John E. Hopcroft and Jeffrey D. Ullman (1979). Introduction to Automata Theory, Languages, and Computation. Reading/MA: Addison-Wesley. ISBN 0-201-02988-X.
^ Pouly, Marc; Kohlas, Jürg (2011). Generic Inference: A Unifying Theory for Automated Reasoning. John Wiley & Sons. Chapter 6. Valuation Algebras for Path Problems, p. 223 in particular. ISBN 978-1-118-01086-0.
^ Jacek Jonczy (Jun 2008). "Algebraic path problems" (PDF). Archived from the original (PDF) on 21 August 2014. Retrieved 20 August 2014., p. 34
^ Brutscheck, M., Berger, S., Franke, M., Schwarzbacher, A., Becker, S.: Structural Division Procedure for Efficient IC Analysis. IET Irish
Signals and Systems Conference, (ISSC 2008), pp.18-23. Galway, Ireland, 18–19 June 2008. [1]
^ "Tiwari, A. (2002). Formal Semantics and Analysis Methods for Simulink Stateflow Models" (PDF). sri.com. Retrieved 14 April 2018.
^ Hamon, G. (2005). A Denotational Semantics for Stateflow. International Conference on Embedded Software. Jersey City, NJ: ACM. pp. 164–172. CiteSeerX 10.1.1.89.8817.
^ Harel, D. (1987). A Visual Formalism for Complex Systems. Science of Computer Programming, 231–274.
^ Alur, R., Kanade, A., Ramesh, S., & Shashidhar, K. C. (2008). Symbolic analysis for improving simulation coverage of Simulink/Stateflow models. International Conference on Embedded Software (pp. 89–98). Atlanta, GA: ACM.
^ Black, Paul E (12 May 2008). "Finite State Machine". Dictionary of Algorithms and Data Structures. U.S. National Institute of Standards and Technology.
^ Anderson, James Andrew; Head, Thomas J. (2006). Automata theory with modern applications. Cambridge University Press. pp. 105–108. ISBN 978-0-521-84887-9.
^ Hopcroft, John E. (1971). An n log n algorithm for minimizing states in a finite automaton (PDF) (Technical Report). CS-TR-71-190. Stanford Univ.
[permanent dead link]
^ Almeida, Marco; Moreira, Nelma; Reis, Rogerio (2007). On the performance of automata minimization algorithms (PDF) (Technical Report). DCC-2007-03. Porto Univ.
^ Revuz, D. (1992). "Minimization of Acyclic automata in Linear Time". Theoretical Computer Science. Elsevier. 92: 181–189. doi:10.1016/0304-3975(92)90142-3.
^ Kaeslin, Hubert (2008). "Mealy, Moore, Medvedev-type and combinatorial output bits". Digital Integrated Circuit Design: From VLSI Architectures to CMOS Fabrication. Cambridge University Press. p. 787. ISBN 978-0-521-88267-5.
^ Slides, Synchronous Finite State Machines; Design and Behaviour, University of Applied Sciences Hamburg, p.18
^ Aho, Alfred V.; Sethi, Ravi; Ullman, Jeffrey D. (1986). Compilers: Principles, Techniques, and Tools (1st ed.). Addison-Wesley. ISBN 978-0-201-10088-4.
Further reading
General
Sakarovitch, Jacques (2009). Elements of automata theory. Translated from the French by Reuben Thomas. Cambridge University Press. ISBN 978-0-521-84425-3. Zbl 1188.68177
- Wagner, F., "Modeling Software with Finite State Machines: A Practical Approach", Auerbach Publications, 2006,
ISBN 0-8493-8086-3. - ITU-T, Recommendation Z.100 Specification and Description Language (SDL)
- Samek, M., Practical Statecharts in C/C++, CMP Books, 2002,
ISBN 1-57820-110-1. - Samek, M., Practical UML Statecharts in C/C++, 2nd Edition, Newnes, 2008,
ISBN 0-7506-8706-1. - Gardner, T., Advanced State Management, 2007
- Cassandras, C., Lafortune, S., "Introduction to Discrete Event Systems". Kluwer, 1999,
ISBN 0-7923-8609-4. - Timothy Kam, Synthesis of Finite State Machines: Functional Optimization. Kluwer Academic Publishers, Boston 1997,
ISBN 0-7923-9842-4
- Tiziano Villa, Synthesis of Finite State Machines: Logic Optimization. Kluwer Academic Publishers, Boston 1997,
ISBN 0-7923-9892-0
- Carroll, J., Long, D., Theory of Finite Automata with an Introduction to Formal Languages. Prentice Hall, Englewood Cliffs, 1989.
- Kohavi, Z., Switching and Finite Automata Theory. McGraw-Hill, 1978.
- Gill, A., Introduction to the Theory of Finite-state Machines. McGraw-Hill, 1962.
- Ginsburg, S., An Introduction to Mathematical Machine Theory. Addison-Wesley, 1962.
Finite state machines (automata theory) in theoretical computer science
Arbib, Michael A. (1969). Theories of Abstract Automata (1st ed.). Englewood Cliffs, N.J.: Prentice-Hall, Inc. ISBN 0-13-913368-2.
Bobrow, Leonard S.; Arbib, Michael A. (1974). Discrete Mathematics: Applied Algebra for Computer and Information Science (1st ed.). Philadelphia: W. B. Saunders Company, Inc. ISBN 0-7216-1768-9.
Booth, Taylor L. (1967). Sequential Machines and Automata Theory (1st ed.). New York: John Wiley and Sons, Inc. Library of Congress Card Catalog Number 67-25924.
Boolos, George; Jeffrey, Richard (1999) [1989]. Computability and Logic (3rd ed.). Cambridge, England: Cambridge University Press. ISBN 0-521-20402-X.
Brookshear, J. Glenn (1989). Theory of Computation: Formal Languages, Automata, and Complexity. Redwood City, California: Benjamin/Cummings Publish Company, Inc. ISBN 0-8053-0143-7.
Davis, Martin; Sigal, Ron; Weyuker, Elaine J. (1994). Computability, Complexity, and Languages and Logic: Fundamentals of Theoretical Computer Science (2nd ed.). San Diego: Academic Press, Harcourt, Brace & Company. ISBN 0-12-206382-1.
Hopcroft, John; Ullman, Jeffrey (1979). Introduction to Automata Theory, Languages, and Computation (1st ed.). Reading Mass: Addison-Wesley. ISBN 0-201-02988-X.
Hopcroft, John E.; Motwani, Rajeev; Ullman, Jeffrey D. (2001). Introduction to Automata Theory, Languages, and Computation (2nd ed.). Reading Mass: Addison-Wesley. ISBN 0-201-44124-1.
Hopkin, David; Moss, Barbara (1976). Automata. New York: Elsevier North-Holland. ISBN 0-444-00249-9.
Kozen, Dexter C. (1997). Automata and Computability (1st ed.). New York: Springer-Verlag. ISBN 0-387-94907-0.
Lewis, Harry R.; Papadimitriou, Christos H. (1998). Elements of the Theory of Computation (2nd ed.). Upper Saddle River, New Jersey: Prentice-Hall. ISBN 0-13-262478-8.
Linz, Peter (2006). Formal Languages and Automata (4th ed.). Sudbury, MA: Jones and Bartlett. ISBN 978-0-7637-3798-6.
Minsky, Marvin (1967). Computation: Finite and Infinite Machines (1st ed.). New Jersey: Prentice-Hall.
Papadimitriou, Christos (1993). Computational Complexity (1st ed.). Addison Wesley. ISBN 0-201-53082-1.
Pippenger, Nicholas (1997). Theories of Computability (1st ed.). Cambridge, England: Cambridge University Press. ISBN 0-521-55380-6.
Rodger, Susan; Finley, Thomas (2006). JFLAP: An Interactive Formal Languages and Automata Package (1st ed.). Sudbury, MA: Jones and Bartlett. ISBN 0-7637-3834-4.
Sipser, Michael (2006). Introduction to the Theory of Computation (2nd ed.). Boston Mass: Thomson Course Technology. ISBN 0-534-95097-3.
Wood, Derick (1987). Theory of Computation (1st ed.). New York: Harper & Row, Publishers, Inc. ISBN 0-06-047208-1.
Abstract state machines in theoretical computer science
Gurevich, Yuri (July 2000). "Sequential Abstract State Machines Capture Sequential Algorithms" (PDF). ACM Transactions on Computational Logic. 1 (1): 77–111. doi:10.1145/343369.343384.
Machine learning using finite-state algorithms
Mitchell, Tom M. (1997). Machine Learning (1st ed.). New York: WCB/McGraw-Hill Corporation. ISBN 0-07-042807-7.
Hardware engineering: state minimization and synthesis of sequential circuits
Booth, Taylor L. (1967). Sequential Machines and Automata Theory (1st ed.). New York: John Wiley and Sons, Inc. Library of Congress Card Catalog Number 67-25924.
Booth, Taylor L. (1971). Digital Networks and Computer Systems (1st ed.). New York: John Wiley and Sons, Inc. ISBN 0-471-08840-4.
McCluskey, E. J. (1965). Introduction to the Theory of Switching Circuits (1st ed.). New York: McGraw-Hill Book Company, Inc. Library of Congress Card Catalog Number 65-17394.
Hill, Fredrick J.; Peterson, Gerald R. (1965). Introduction to the Theory of Switching Circuits (1st ed.). New York: McGraw-Hill Book Company. Library of Congress Card Catalog Number 65-17394.
Finite Markov chain processes
- "We may think of a Markov chain as a process that moves successively through a set of states s1, s2, …, sr. … if it is in state si it moves on to the next stop to state sj with probability pij. These probabilities can be exhibited in the form of a transition matrix" (Kemeny (1959), p. 384)
Finite Markov-chain processes are also known as subshifts of finite type.
Booth, Taylor L. (1967). Sequential Machines and Automata Theory (1st ed.). New York: John Wiley and Sons, Inc. Library of Congress Card Catalog Number 67-25924.
Kemeny, John G.; Mirkil, Hazleton; Snell, J. Laurie; Thompson, Gerald L. (1959). Finite Mathematical Structures (1st ed.). Englewood Cliffs, N.J.: Prentice-Hall, Inc. Library of Congress Card Catalog Number 59-12841. Chapter 6 "Finite Markov Chains".
External links
| Wikimedia Commons has media related to Finite state machine. |
Finite State Automata at Curlie
Modeling a Simple AI behavior using a Finite State Machine Example of usage in Video Games
Free On-Line Dictionary of Computing description of Finite State Machines
NIST Dictionary of Algorithms and Data Structures description of Finite State Machines
Interactive FSM: Control Circuit, demonstrates the logic flow of the Finite State Machines.
FSM simulator, simulates DFAs, NFAs and ε-NFAs, including generated by regular expression.
A brief overview of state machine types, comparing theoretical aspects of Mealy, Moore, Harel & UML state machines.
Turing Machine and FSM simulator Tuple-based FSM and Turing Machine simulator with simulation of tape.


