负反馈
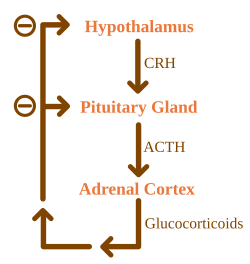
許多內分泌系統中的荷爾蒙都是由負反饋系統所控制,例如腎上腺分泌的糖皮質激素就是如此。下視丘分泌促肾上腺皮质素释放素(CRH),CRH會使腦下垂體分泌促腎上腺皮質素(ACTH),而ACTH會使腎上腺分泌糖皮質激素,如皮質醇。糖皮質激素不但會使身體有對應的反應外,也會使下視丘和腦下垂體的分泌減少,因此只要糖皮質激素已經到達一定的量,就不會再繼續分泌。[1]
負回饋(英语:negative feedback),是反馈的一種。是指系统的输出會影響系統的輸入,在輸出變動時,所造成的影響恰和原來變動的趨勢相反;反之,就稱為正回饋。另一種說法是系统在一個條件變化時,系統會作出抵抗該變化的行為。例如人的體溫上昇時會流汗,流汗會散熱使體溫下降,就是負反饋的一個例子;在自然界有許多系統有負反饋的特性,其他例子包括勒沙特列原理和楞次定律。
在特定的條件下,負回饋會使系统趋于稳定,负反馈的研究是控制理论的核心问题。
目录
1 簡介
2 舉例
2.1 機械工程
2.2 控制
2.3 生物
2.4 經濟
2.5 放大器
3 參見
4 參考資料
簡介
在物理系統及生物系統中,許多不同的影響會互相制衡,例如說在生物體內,某一種化學物質會使生物系統趨向一特定狀態,而另外一種化學物質會使系統遠離該狀態,若其中至少有一種的影響是非線性的,就可能會有平衡點出現。在生物學或生物化學中,以上的機制稱為恆定,在力學中,以上的機制稱為平衡。
負回饋中的「負」表示在數學模型中,反饋部份的係數為負。若以下式表示一個系統
- y=H(x){displaystyle y=H(x)}

負回饋可以說是在輸入部份加上以下的量,來抵消輸出的變化。
- x1=−kΔy,k>0{displaystyle x1=-kDelta y,k>0}

因此在有擾動時,負回饋可以抵消輸出的影響。
相反的,正反馈的系統,輸出變動時,系統會放大原來的輸出變動,無法達到平衡的效果。不論是正反饋或負反饋的系統都會有反饋迴路,使輸出可以再影響系統。
負反饋可用來控制系統,使系統的實際輸出達到其理想值。
舉例
機械工程

離心式調速器
在1788年,瓦特為了控制蒸汽機速度所設計的離心式調速器就是利用負反饋的原理。這也是第一個自動控制系統。[2]
在離心式調速器中有二顆重球,其旋轉速度和蒸汽機相同,當蒸汽機的速度提高時,重球因離心力移到調速器的外側,因此會帶動機構,關閉蒸汽機進氣閥門,降低蒸汽機速度,當蒸汽機速度過低時,重球會移到調速器的內側,會再開啟蒸汽機進氣閥門,增加蒸汽機速度。依此原理即可將蒸汽機的速度控制在一定範圍內。
控制
控制系統中常使用負反饋系統,例如自動調溫器、鎖相環、荷爾蒙的調節(如上方的圖示)及動物體內的溫度調節。此時要控制的量視為系統的輸出。
以自動調溫器在暖氣系統的應用為例,當房間內的溫度低於設定的下限溫度時,自動調溫器會打開暖氣系統,而當溫度高於上限溫度時,自動調溫器會關閉暖氣系統,若下限溫度和上限溫度很接近時,就可以使室溫控制在一個穩定的範圍。類似的原理也用在冷卻系統中,如冷氣及冰箱。
控制系統中使用負反饋不表示系統一定穩定。BIBO稳定性及李雅普諾夫穩定性可用來定義系統的穩定性,奈奎斯特穩定判據可以判別線性非時變系統是否穩定。
生物
生物體內有許多的負反饋系統,如維持血壓穩定的感壓反射(baroreflex)、體溫及血糖的恆定等。若反饋系統失靈,可能會出現一些不良的影響。以血糖恆定的反饋系統出現問題,血液中的血糖濃度會劇烈的昇高,因而造成糖尿病。
荷爾蒙的分泌也受到負反饋系統的控制:當腺體X分泌荷爾蒙X,目的器官收到後會分泌荷爾蒙Y,當荷爾蒙Y已到達一定量時,腺體X就會停止荷爾蒙X的分泌。
經濟
在經濟領域中,政府的自動財政政策(automatic stabiliser)也是一種負反饋,利用固定的稅率及政府開支來緩和GDP的變化。根據邊際效益遞減效應,在消費量增加後,單位消費量的效益(即邊際效益)會減少,也可以視為是一種負反饋。[3]
放大器

利用負反饋原理的反相閉迴路放大器
負反饋的放大器是貝爾實驗室的哈羅德·史蒂芬·布萊克在1927年發明,在1934年申請專利[4]。負反饋常用在許多種類的放大器系統(例如運算放大器)中,主要目的都是為了穩定系統和改善系統特性。
基本上所有的電子元件(像真空管、電晶體、MOSFET)都有一部份非線性的特性,使用負反饋可以提高線性度,不過會犧牲一些增益。假設有一個放大器在某一頻率範圍內的開路增益太大,不配合負反饋時,該頻率範圍的回授信號會特別大。若配合負反饋使用時,因為回授信號來自於輸出端,該頻率範圍的回授信號也會特別的大,和輸入信號相減後,可以緩和該頻率範圍輸出信號的變化。
雖然負反饋可以使線性度提高,不過若設計不當也可能會使系統不穩定,出現振蕩。貝爾實驗室的哈里·奈奎斯特有提出理論,說明如何穩定一個不穩定的系統。
參見
- 正反馈
- 控制理論
- 负反馈放大器
- 社會控制理論
- 李雅普诺夫稳定性
- 奈奎斯特稳定判据
參考資料
^ Raven, PH; Johnson, GB. Biology, Fifth Edition, Boston: Hill Companies, Inc. 1999. page 1058.
^ I.J.Nagrath; M.Gopal. 1. Control System Engineering Second. Wiley. : 5–7. ISBN 957-9590-53-2. 引文使用过时参数coauthors (帮助)
^ 周慶華. 4. 文學理論 2004. 五南圖書出版股份有限公司. : 170. ISBN 9571134775. 使用|accessdate=需要含有|url=(帮助)
^ Bell Telephone Laboratories, Wave Translation System, US patent 2,102,671, 1937-10-21, [1]


